














Terrain Relative Navigation
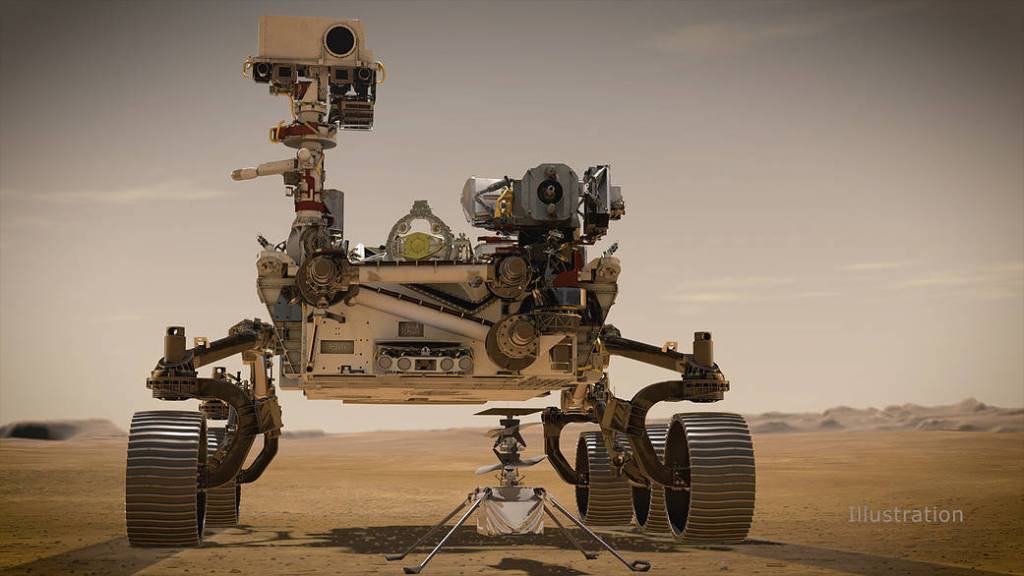
Terrain Relative Navigation (TRN) is critical for Mars exploration. This innovative entry, descent and landing technology allows the rover to detect tricky terrain and divert itself to a safer landing area.
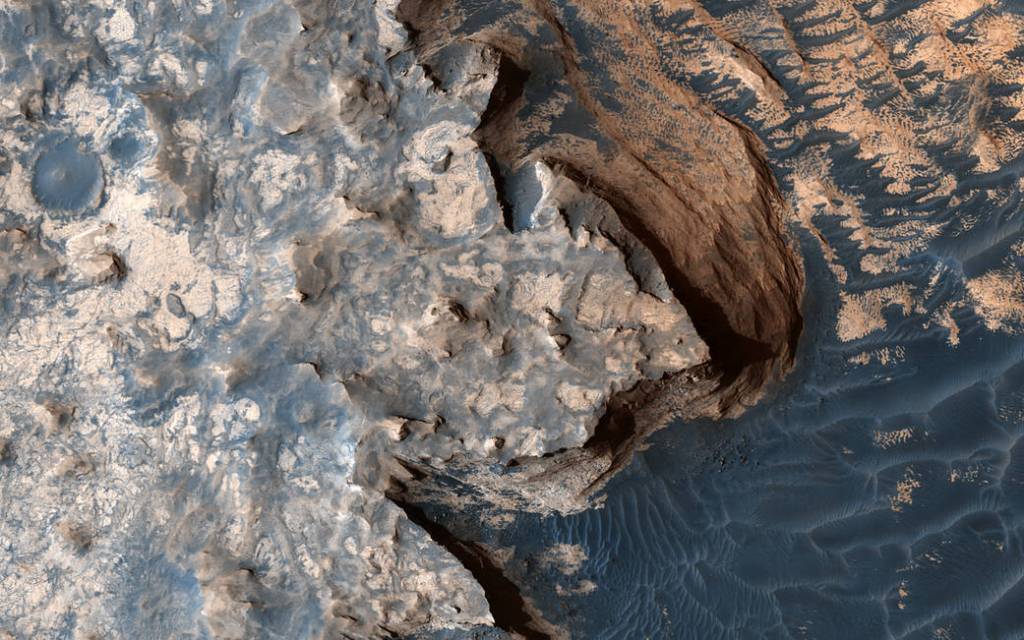
Terrain Relative Navigation is an onboard spacecraft function that generates an estimate of the position of the rover relative to a map of the planetary surface. Through this technology, the orbiter can create a map of the landing site, including known hazards, and store the map in its computer. When the rover descends with its parachute, it takes pictures of the fast-approaching surface and compares the captured images with the stored map. The rover can then divert itself away from hazards and toward safer ground.
Terrain Relative Navigation are funded by NASA’s Space Technology Mission Directorate’s Technology Demonstration Missions program. The projects are led by NASA’s Jet Propulsion Laboratory in Southern California.