























Hace tres años, un par de robots fueron enviados a la Estación Espacial Internacional para ayudar a allanar el camino para el futuro de la robótica y los sistemas autónomos en el espacio. Esos pioneros fueron Honey (Miel) y Bumble (de “Bumble bee”, abejorro en inglés), a quienes pronto se les unió un tercer compañero llamado Queen (Reina). Juntos, forman el sistema robótico de vuelo libre Astrobee (nombre que correspondería a “Astro-abeja” en español). Los robots de vuelo libre como los Astrobees son componentes esenciales de la misión Artemis de la NASA para llevar a los seres humanos de regreso a la Luna, antes de viajar a Marte y más allá.
“Existe una razón por la que tantas historias de ciencia ficción tienen un robot querido que acompaña a los héroes humanos: sabemos que no podemos explorar el espacio solos”, dijo José Benavides, gerente de proyectos de las Instalaciones de Astrobee en el Centro de Investigación Ames de la NASA, en Silicon Valley, California. “Estamos demostrando que los humanos y los sistemas robóticos pueden colaborar y apoyar un poderoso trabajo de investigación científica e ingeniería más allá de la Tierra”.
Desde su lanzamiento, el programa Astrobee —ejecutado por el centro Ames de la NASA— ha operado más de 750 horas en la estación espacial, completando más de 100 actividades, desde demostraciones tecnológicas hasta asistencia en experimentos. Los robots han demostrado ser capaces de hazañas que previamente solo se encontraban en el ámbito de la ciencia ficción, como detectar una anomalía durante una simulación en la estación y conectarse de manera autónoma con los subsistemas de la estación. Honey, Bumble y Queen han sido abejas robóticas bien atareadas, y no dan señales de desacelerar su ritmo de trabajo.
Tres años de evolución de los Astrobees
Los Astrobees son una tecnología de nueva generación, que se basa en tres robots en forma de esfera pertenecientes al proyecto Satélites experimentales sincronizados de mantenimiento de posición, acoplamiento y reorientación (SPHERES, por sus siglas en inglés). Los Astrobees evolucionaron a partir de ese concepto inicial a medida que los investigadores desarrollaban nuevas herramientas y capacidades.
Vuelan a través de la microgravedad usando ventiladores eléctricos, “ven” usando cámaras y sensores, y tienen brazos para sostener objetos o mantenerse inmóviles en tareas que requieren estabilidad. Los investigadores también han probado una tecnología adhesiva, inspirada en las patas del gecko, para permitir que los Astrobees se agarren a diversas superficies sin tener que aplicar fuerza para adherirse y luego se desprendan a pedido. Los equipos que trabajan en los Astrobees imaginan un sistema robótico que sea lo suficientemente inteligente y versátil como para manejar tareas de mantenimiento y monitoreo más simples, para que los astronautas puedan ocuparse de abordar trabajos más complejos.
Pero la plataforma Astrobee no es solo para astronautas. Por medio del desafío anual Reto Kibo de Programación de Robots, operado junto con la Agencia de Exploración Aeroespacial de Japón (JAXA, por sus siglas en inglés), ahora en su tercera edición, estudiantes de todo el mundo pueden escribir código para los Astrobees. Los equipos ganadores ven ejecutar sus programas en los robots en el espacio. Inspirar a una nueva generación de programadores e ingenieros es vital, a medida que la NASA se prepara para un futuro en el que la robótica desempeñará un papel central para la humanidad en la exploración más allá de nuestro planeta.
Autonomía robótica para Artemis y más allá
A diferencia de la estación espacial, puede que los futuros puestos de avanzada en el espacio profundo no estén tripulados durante todo el año y que necesiten sistemas autónomos para permanecer operativos. Eso incluye Gateway, que orbitará la Luna y servirá como punto de lanzamiento para las misiones a Marte.
El proyecto Sistema integrado para el cuidado autónomo y adaptativo (ISAAC, por sus siglas en inglés) tiene como objetivo hacer pruebas de cómo los sistemas robóticos pueden completar tareas como reparaciones, mantenimiento e incluso experimentos, de forma independiente.
Al dar a Honey y a Bumble desafíos para resolver por su cuenta —como quitar un “calcetín” que bloquea un conducto de ventilación—, ISAAC está desarrollando las capacidades necesarias para que los robots cuiden de las naves espaciales cuando los astronautas no están a bordo. Pero un componente importante de operar de manera autónoma en un entorno complejo es poder tener un mapa detallado y saber dónde se encuentra uno.
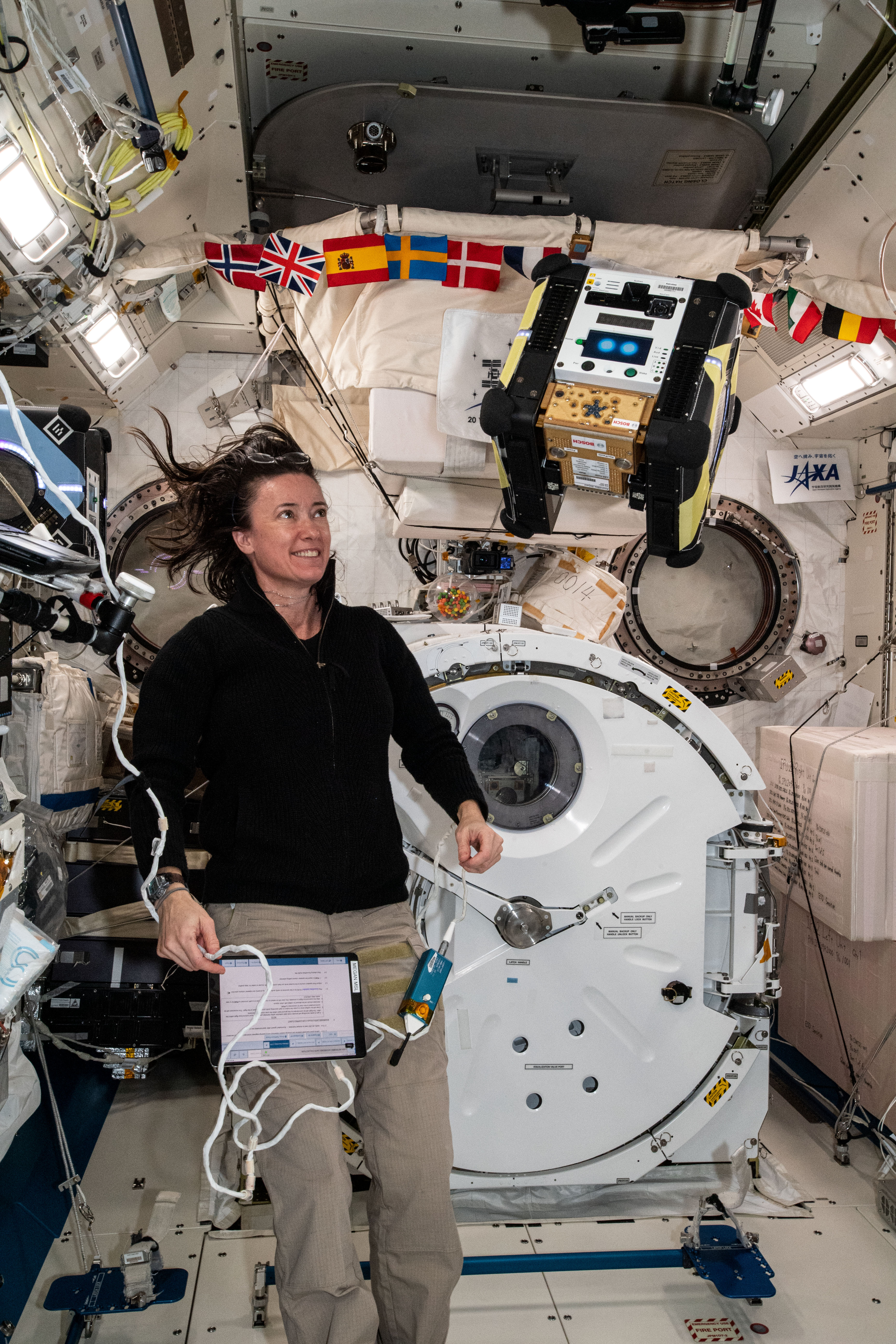
Las dos demostraciones más recientes de ISAAC utilizaron Astrobees para crear mapas en 3D del interior de la estación espacial. Bumble salió volando de su módulo de inicio y trazó el mapa tridimensional de un nuevo entorno por su cuenta. La capacidad de explorar y crear mapas de forma independiente es esencial para el futuro de la robótica autónoma.
“Hace tres años, queríamos hacer pruebas de cómo la robótica podría apoyar la exploración espacial humana, no solo para esta década, sino para las próximas décadas”, dijo Maria Bualat, subgerente de proyectos de ISAAC en el centro Ames. “Estamos empezando a ver cómo será eso”.
Astrobee e ISAAC fueron financiados por el Programa de Desarrollo Game Changing de la NASA, que es parte de la Dirección de Misiones de Tecnología Espacial.