


















Integrated System for Autonomous and Adaptive Caretaking (ISAAC)
ISAAC delivered technologies to enable remote and autonomous caretaking of Gateway during long periods of time when crew were not onboard to perform maintenance, logistics management, and utilization tasks, as well as when Gateway was out of communication with ground controllers. These benefits were also “Mars-forward” in that the same capabilities were needed for sending human crews farther into deep space.
Lead Center
Ames Research Center
Introduced
November 2018
Principal Technologist
Danette Allen
Project Manager
Trey Smith
Since 2019, NASA’s Integrated System for Autonomous and Adaptive Caretaking (ISAAC) project, based at NASA’s Ames Research Center and Johnson Space Center, developed technology for autonomous caretaking of spacecraft, primarily during uncrewed mission phases. ISAAC aimed to integrate autonomous intra-vehicular robots with vehicle infrastructure. ISAAC technology has been demonstrated in software simulation, ground testing, and during 16 activities with the free-flying Astrobee robots in the International Space Station (ISS).
NASA needs autonomous systems to help monitor and maintain exploration spacecraft and habitats during long-duration deep-space missions, particularly during extended periods when astronauts are away. For example, NASA’s Gateway space station near the Moon, currently under development, may have crew present aboard Gateway as little as six weeks per year. The Gateway will give NASA and its partners access to more of the lunar surface than ever before, supporting both human and robotic missions.
The Integrated System for Autonomous and Adaptive Caretaking project developed technology for combining robots inside a spacecraft with vehicle infrastructure subsystems, like power and life support, to form an integrated autonomous system. ISAAC technology can be applied to the Gateway and later on to exploration missions to Mars and beyond. The system validated its technology through demonstrations using existing robots onboard the International Space Station as analogs for future robots that will be developed for the Gateway. These existing robots include the Astrobee free-flying robots and the Robonaut mobile manipulator.
ISAAC technology demonstrated three capability areas. The system combined robotic inspection with telemetry from vehicle subsystems to better monitor vehicle health. Additionally, the software used robots onboard to help track inventory and transfer bags from uncrewed cargo supply vehicles into the exploration spacecraft, saving astronaut time. This technology also enabled autonomous robotic response to critical problems such as a leak caused by a micrometeoroid impact.
ISAAC technology changed the operational processes for future exploration spacecraft. It reduced dependence on the continuous presence of astronauts and continuous ground control communication with minimal lag, thereby reducing mission risk and enabling new kinds of deep-space missions.
Partners:
Multiple projects in NASA’s Advanced Exploration Systems division provided assistance:
- The Autonomous Systems and Operations project assisted with technology for robust planning and execution.
- The Logistics Reduction project funded the return of Robonaut to the International Space Station, as well as the RFID Recon payload for Astrobee, which could allow the Astrobee robot to track inventory on the ISS through smart tags in the future.

ISAAC has three main technology themes:
- Integrated Data: ISAAC has linked spacecraft data and models with autonomous robots, as well as linking 3D geometry with multimodal sensor data map layers and detecting changes and anomalies.
- Integrated Control Interface: ISAAC developed prototype control interfaces that visualize spacecraft data and multi-robot data together, improving system-level situation awareness and operator productivity.
- Coordinated execution: ISAAC developed prototype execution managers that use automated planning and coordinate multi-robot activities.
Autonomous State Assessment
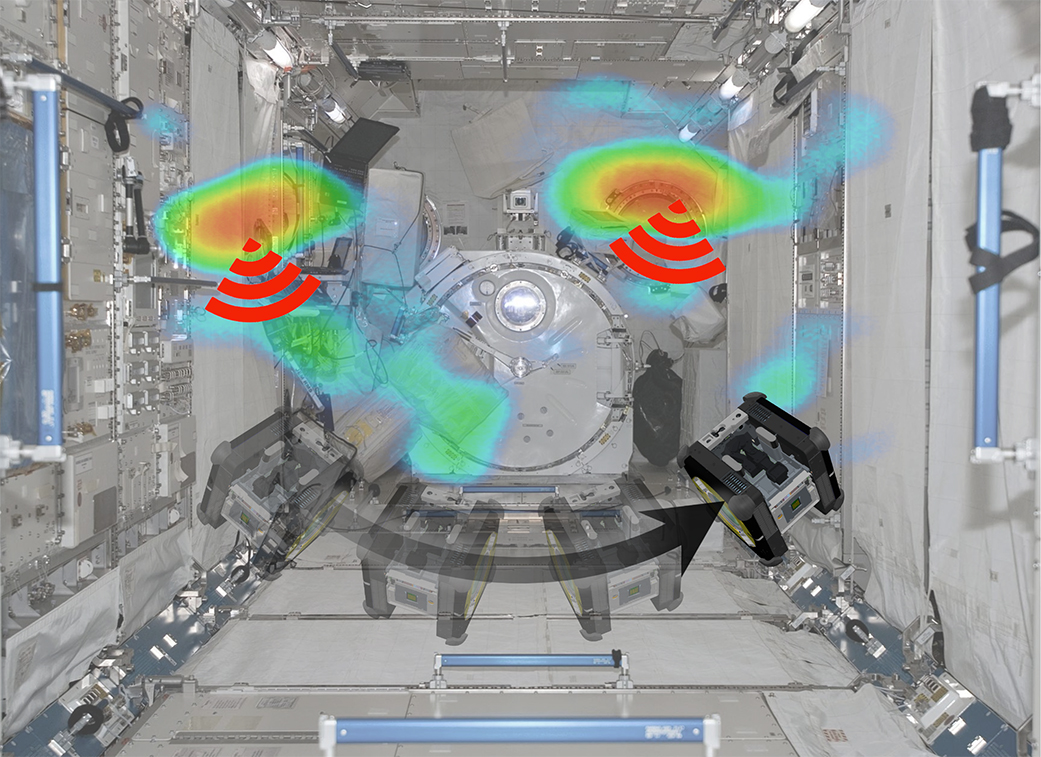
ISAAC used two Astrobee free-flyers to demonstrate an autonomous multi-robot, multi-sensor interior survey of two ISS modules, coordinating the robots using onboard automated planning and execution. The resulting data was used to build a panoramic tour valuable for ISS operators.
Autonomous Logistics Management
In software simulation, ISAAC demonstrated an uncrewed cargo transfer scenario involving an Astrobee robot flying multiple cargo bags from modules of the Gateway lunar space station to a docked cargo vehicle where they could be stowed by a Robonaut manipulator robot. An automated execution manager translated the high-level goal to coordinated actions and executed them on both robots.
Integrated Fault Management
Using an Astrobee on ISS, a high-CO2 anomaly was injected into synthetic vehicle telemetry. The Astrobee responded by performing an automated inspection of a mockup obstructed exhaust vent and used computer vision to detect and report the obstruction. In a fuller scenario, a manipulator robot would then have cleared the obstruction, but no manipulator was available on ISS.
ISAAC’s accomplishments included several space robotics firsts:
- The first time a robot autonomously navigated between multiple modules inside a spacecraft.
- The first time a robot located a sound source inside a spacecraft (in collaboration with the SoundSee Astrobee payload team from Bosch USA).
- The first time a mobile robot surveyed a spacecraft interior to build a map for human viewing. An ISAAC-prototyped adaptive-telemetry-rate management approach was later implemented for the Vehicle System Manager software on NASA’s Gateway station.
Most ISAAC software and data from ISAAC ISS activities has been released open source to the public, including significant improvements to the baseline flight software on the Astrobee robots that will benefit future users of the ISS Astrobee Facility. ISAAC staff have also mentored dozens of student researchers over the years to help train the next generation of space robotics talent. Overall, ISAAC has taken important initial steps toward demonstrating the feasibility of using intra-vehicular robotics for vehicle caretaking.
Latest News


NASA Kennedy Breathes Life into Moon Soil Testing
NASA Moon Observing Instrument to Get Another Shot at Lunar Ops

NASA’s Dust Shield Successfully Repels Lunar Regolith on Moon

The Sky’s Not the Limit: Testing Precision Landing Tech for Future Space…



