















Ryan Caverly
University of Minnesota
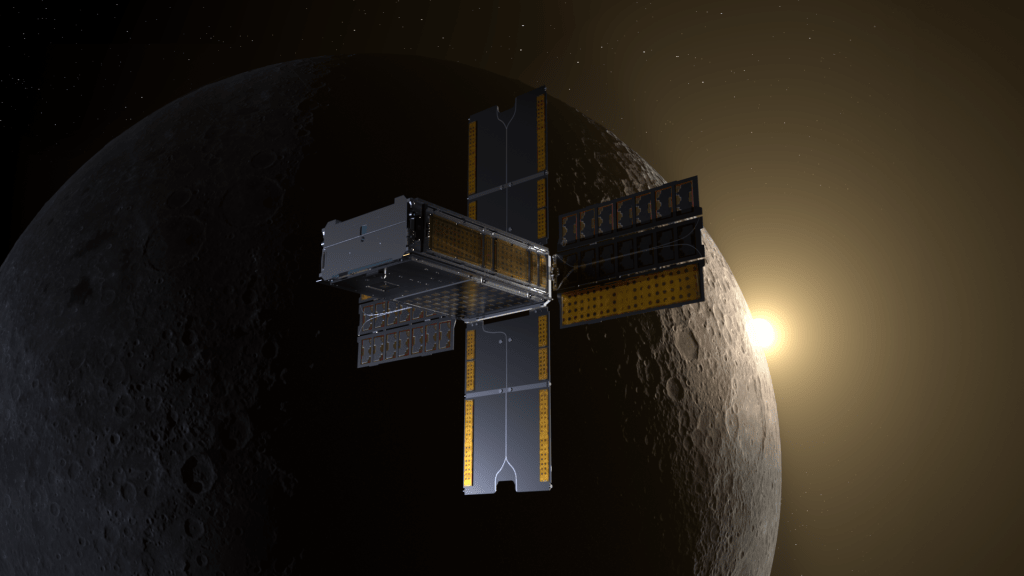
Through the use of solar-radiation-pressure (SRP)-based propulsion, solar sails offer unique mission capabilities, including orbits outside of the ecliptic plane and interstellar travel. Solar sail technology has advanced in recent years, and it is now conceivable that solar sails with areas of thousands of meters squared will be fabricated and deployed in the coming decades. An unsolved challenge in the design of solar sails is ensuring their attitude and momentum can be controlled accurately and reliably using technology that scales up to the size of these large, next-generation solar sails. To address this, we propose the Cable-Actuated Bio-inspired Lightweight Elastic Solar Sail (CABLESSail) concept, which leverages lightweight cable-driven actuation to achieve controllable elastic solar sail deformations that induce an imbalance in SRP and generate large, scalable control torques in all three axes.