
















John Christian
Rensselaer Polytechnic Institute
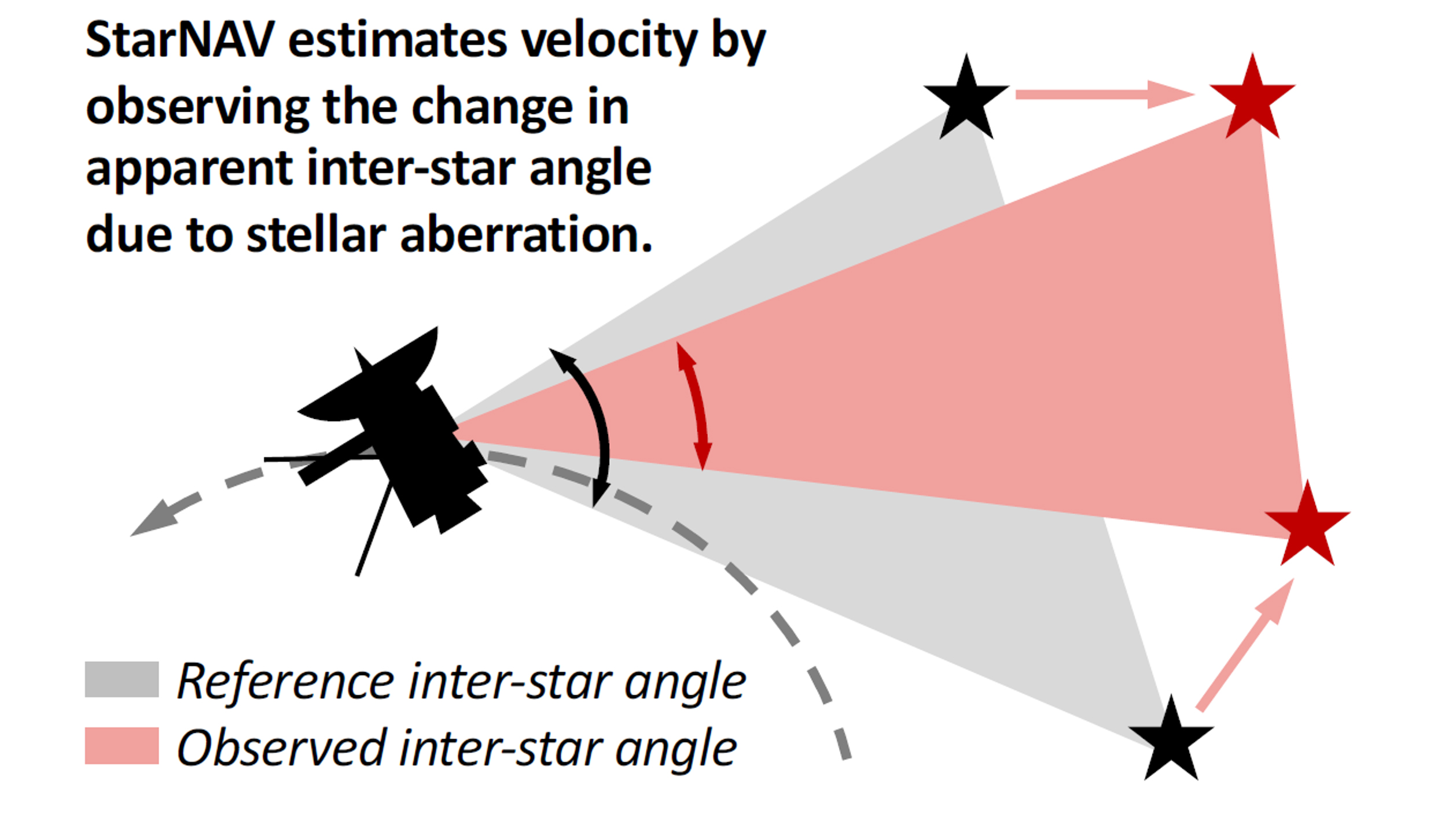
StarNAV is a novel architecture for navigating anywhere in the Solar System or beyond using the relativistic perturbation of starlight. The proposed StarNAV technique measures the change in inter-star angle due to stellar aberration to estimate vehicle velocity. These velocity estimates may be used for navigation. By converting the effect of stellar aberration from a nuisance parameter into the navigation observable, StarNAV represents a significant departure from the conventional way that star sightings are used for navigation. The StarNAV architecture could benefit a wide array of proposed NASA missions, especially those operating at large distances from Earth. The proposed work considers two such scenarios: (1) a flagship-scale exploration mission to Neptune and (2) a mission to perform in situ exploration of the interstellar medium. The anticipated NIAC Phase I activities include (1) exploration of the StarNAV sensor trade space and (2) evaluation of StarNAV within an aerospace architecture. It is impossible to complete either of these activities without the other. Our Phase I efforts are expected to advance StarNAV from TRL 1 to TRL 3.



