












Hari Nayar
NASA Jet Propulsion Laboratory
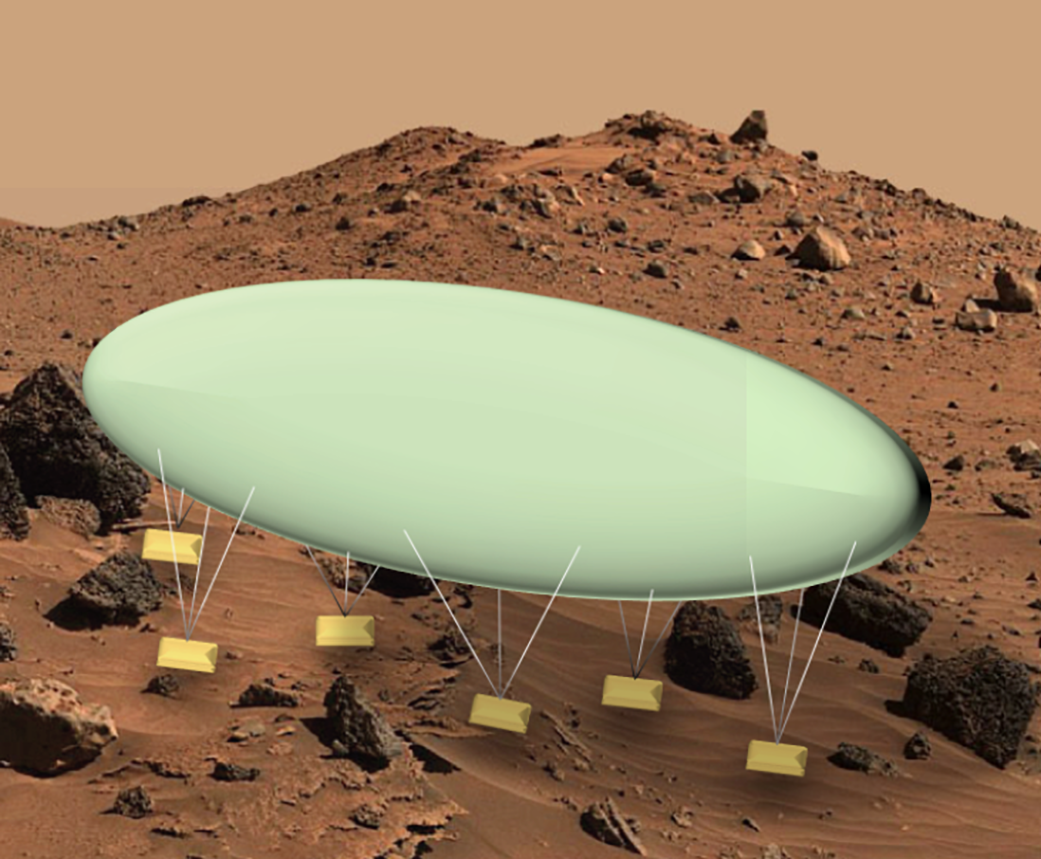
We propose a balloon platform with 6 suspended modules each containing a payload that also serves as a foot for locomotion. Each foot is suspended by 3 cables to the balloon to control the placement of the foot on the ground. Only 1 foot/payload is raised at a time to move to a new location on the surface while the remaining feet keep the balloon anchored to the surface. The balloon buoyancy is only needed to lift 1 foot at a time. Feet are moved in sequence to locomote over the surface. The platform is highly stable because its center of gravity is almost at ground level. Images from cameras on the balloon are used to map and locate foot placement and for navigation.



