












Quinn Morley
Planet Enterprises
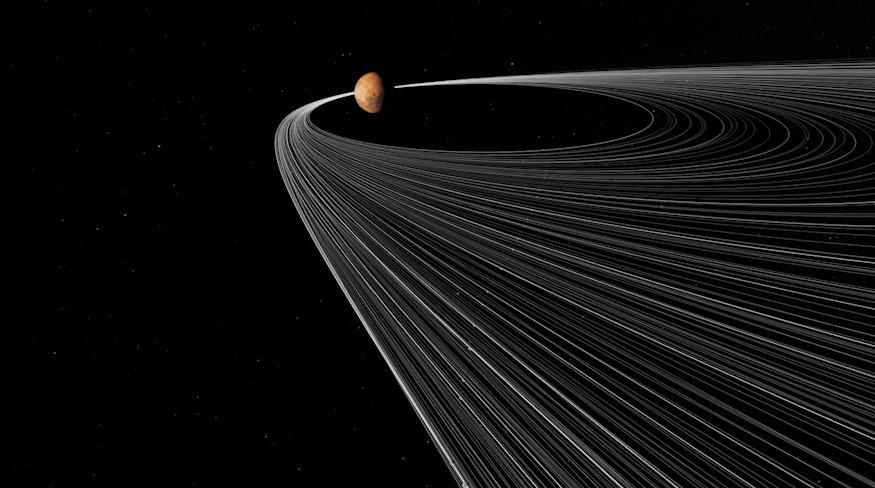
It is now believed that subglacial liquid water exists on Mars, at a depth of 1.5 km in the South Polar Layered Deposits (SPLD). This evidence was published by Orosei et al. in 2018, and immediately sent reverberations through the aerospace community. Chris McKay, Senior Scientist for the NASA Ames Research Center was heard on the Planetary Radio podcast saying: “If we’re going to do astrobiology, we need to not just see it, we need to get a piece of it, we need to get a sample of it. So I think this becomes a very strong argument for deep drilling” (Kaplan, 2018). The chances that this formation and subglacial lake may harbor life are greatly increased if the liquid phase is made possible due to heat produced by volcanic activity under the crust, which was indicated in a follow-up report by Sori & Bramson in 2019. Prior to these discoveries, the SPLD was already one of the most scientifically significant formations on Mars, having witnessed atmospheric and climactic changes dating back to 4 billion years (Bar-Cohen, 2009, p. 352). There is currently no deep drilling system ready to take on this task, with the technology leader (the InSight HP3 “mole” probe) stuck just centimeters under the ground. Furthermore, there are no autonomous deep drills currently above TRL 4 in the NASA technology pipeline (Zacny, 2018).
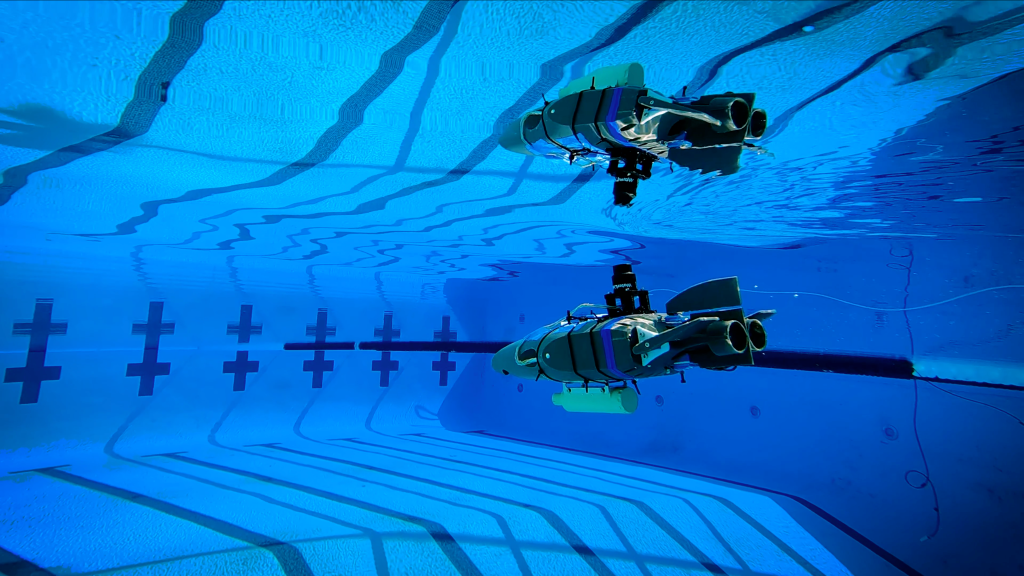
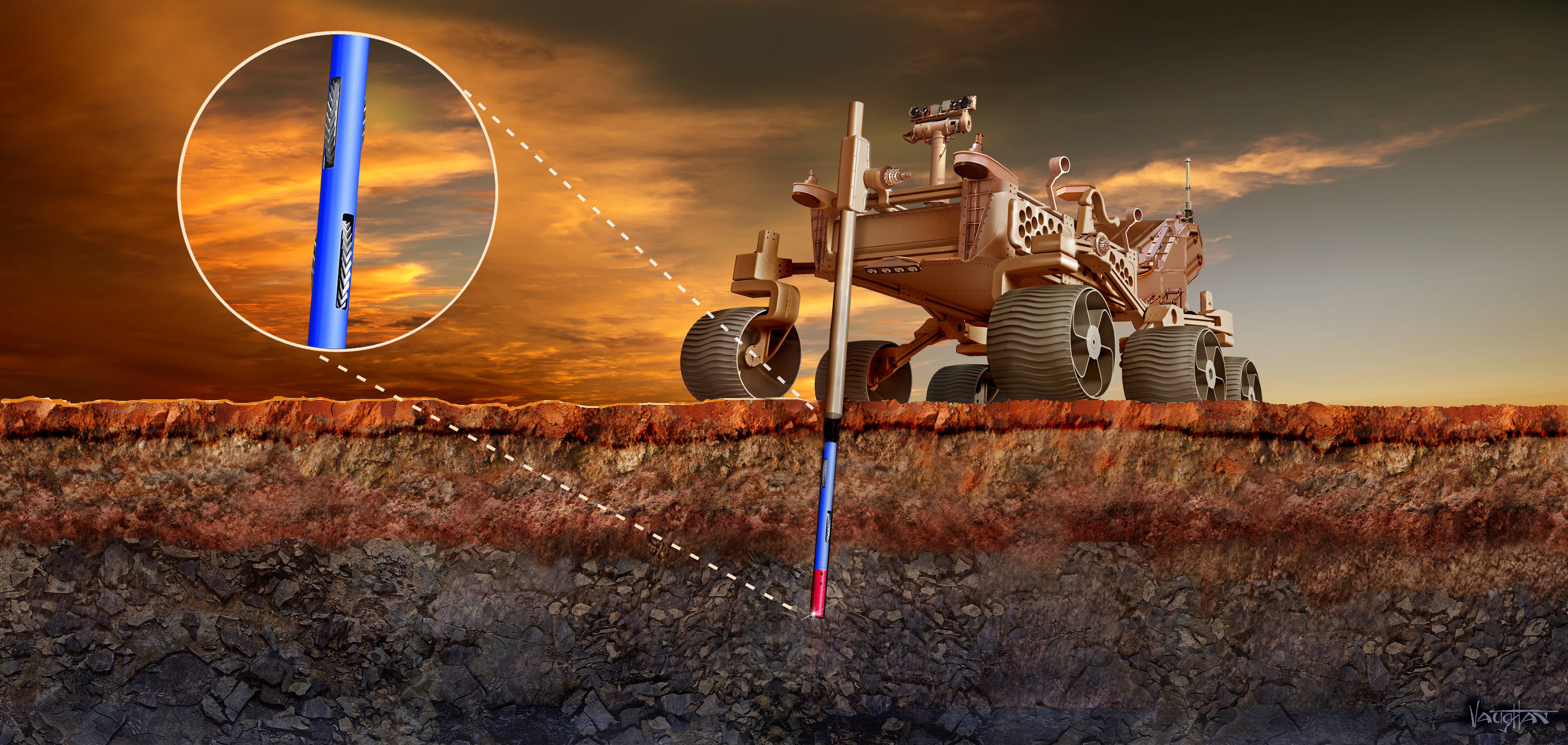
We propose an autonomous drilling system that would utilize a Perseverance-type rover as a drill rig. The rover would be outfitted with minimal but appropriate science instruments, and a drilling strategy that has a high level of redundancy. The drilling strategy does not rely on cables; instead, self-contained robots drive up and down the borehole autonomously. These robots are nicknamed “borebots” and are on the order of 1 m long.
The borebots are deployed from a tube moved into place by simple linear actuators on the rover deck and can begin drilling while driving into the borehole. Locomotion is achieved using a rubber tank track system that presses against the sides of the borehole. The borebot will drill approximately 150 mm during each trip, and then the ice core is parted off and carried to the surface by driving up the borehole. A robotic arm is used to remove the borebot from the borehole and move it into one of the service bays in the side of the rover for core sample removal and automated servicing. Once out of the way, the next borebot can go down the hole and start drilling. Around a dozen borebots could be housed in honeycomb-esque service bays, while shorter bays near the rear of the rover can house extra coring bits and other spare parts.
When an ice core is removed from a borebot in one of the service bays, the rover will prepare the core for in-situ analysis and caching with internal processing equipment. It is likely that core samples will either be dedicated to in-situ analysis or cached for later retrieval. However, it may be possible for cores to be both analyzed and cached. Preserving the integrity of the ice cores must be a top priority. Thus, the processing systems will be studied carefully.
The proposed mission is to drill 20 m to 50 m deep in the SPLD using a nuclear-powered Perseverance-type rover and the borebot drilling architecture. If 20 m to 50 m depth is achieved within a 90-day mission, an extended mission could aspire for the goal of 1.5 km. The system does not grow in complexity as depth increases, and consumable use scales linearly. The extended mission could take around four years and collect thousands of core samples. The samples would be analyzed, and the data returned to Earth. Dozens of samples could be cached during this time. This study will evaluate concept feasibility, determine the range of possible borehole travel speeds, evaluate power consumption and power sources, evaluate strategies to preserve sample integrity, and assess the science instrumentation relevant to ice core analysis.



