


















Dimitra Panagou
University Of Michigan

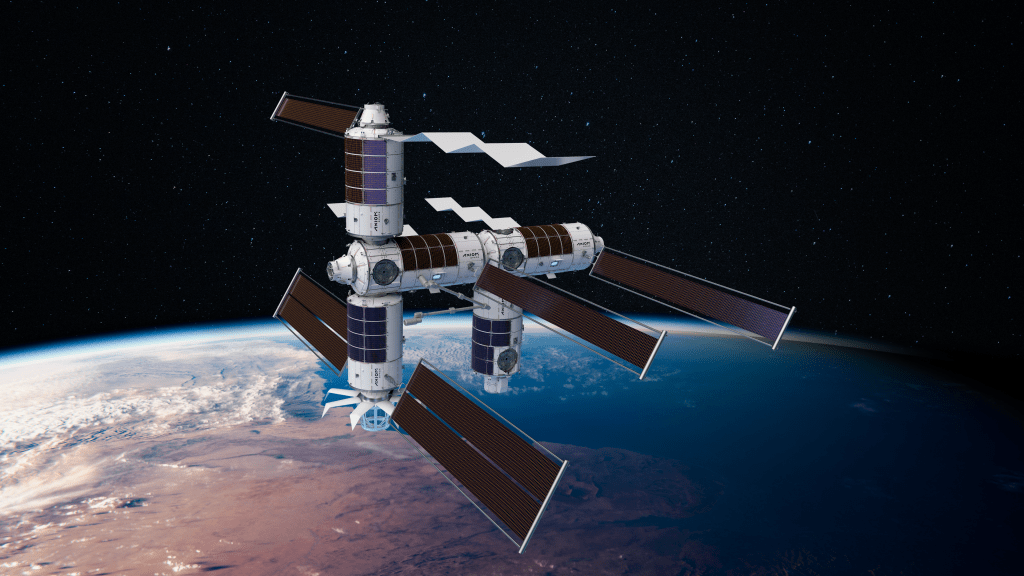
NASA has long been concerned with the potential for micrometeoroid and orbital debris impacts to compromise the structural integrity of manned spacecraft. Visual inspection of spacecraft exteriors by crew members has been the preferred method of finding and assessing hull damage. In this proposal we aim at ultimately making the inspection and maintenance processes less time consuming and overall easier for the astronaut, and we introduce the AstroNet: A Network of Astronautical Free-Flying Co-Robots to interact with the crew members and assist them in their Extra-Vehicular Activities (EVAs) such as inspection, maintenance and repair of spacecraft exteriors. The Astronet is envisioned to: (i) safely surround the crew member during EVAs, (ii) perceive simple human commands (e.g., gestures) and interpret them into predefined tasks, (iii) respond to human commands by redistributing autonomously in space to dynamically and continuously improve task conditions (e.g., visualize areas beyond the line-of-sight of the astronaut, shed light, bring tools) in a human-centric way.