















Ethan Schaler
NASA JPL
The next decades of space exploration will focus on Ocean Worlds – especially Enceladus, Europa, and Titan – whose liquid oceans beneath kilometers of icy crust are some of the most likely locations beyond Earth to harbor life. To access these aquatic environments, NASA is developing and maturing numerous ocean-access mission concepts, including the Scientific Exploration Subsurface Access Mechanism for Europa (SESAME) class of thermo-mechanical drilling robots. We propose developing SWIM – Sensing with Independent Micro-swimmers – dramatically expand the capabilities of SESAME-class ocean-access robotic missions and significantly increase their likelihood of detecting evidence of habitability / biomarkers / life.
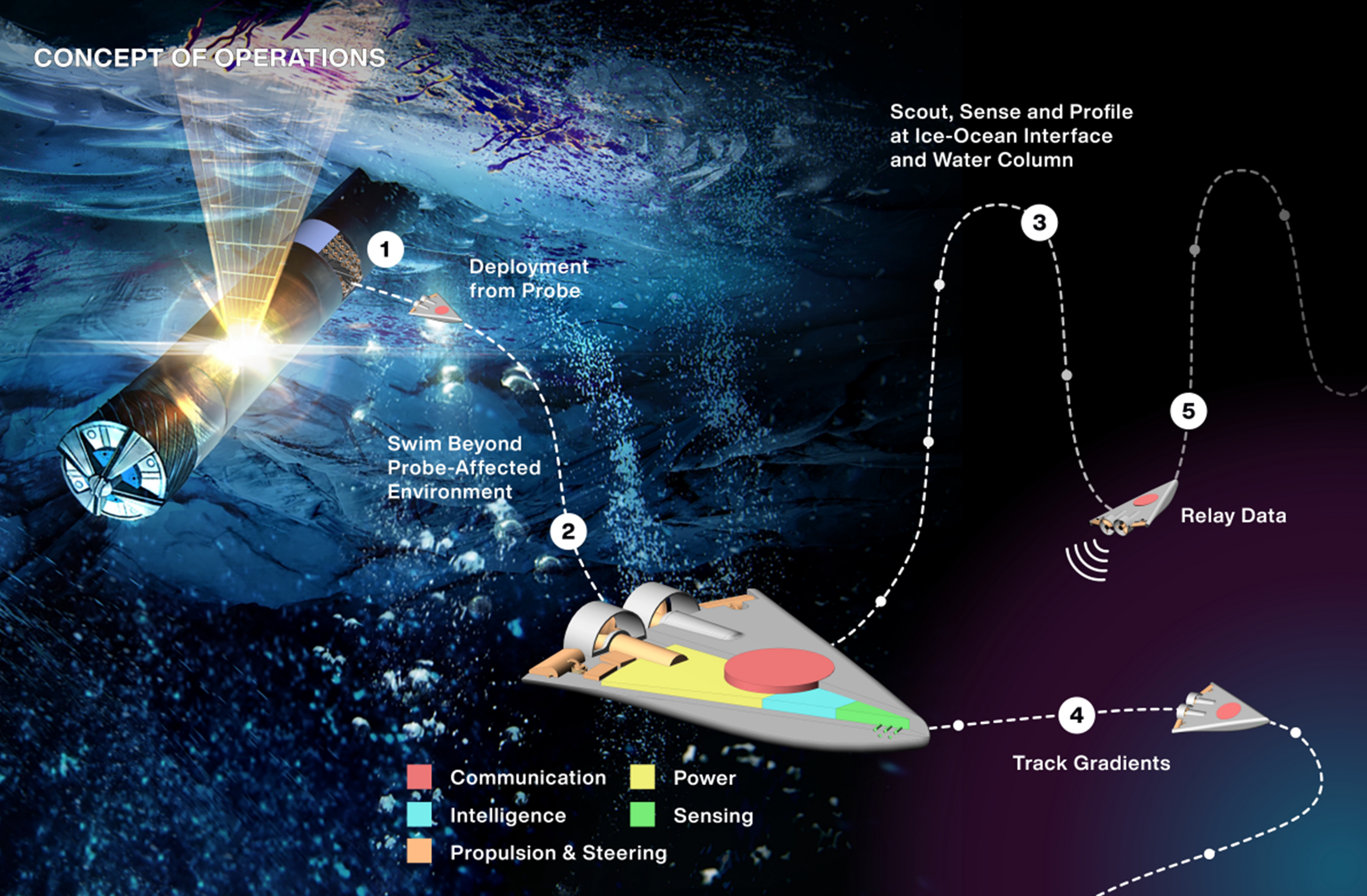
The SWIM system consists of scores of 100 cm^3-scale, 3D-printed swimming micro-robots (micro-swimmers) equipped with MEMS sensors, propelled by miniature actuators, and wirelessly communicating with ultrasound waves. The micro-swimmers are deployed individually or as a swarm from a single SESAME robot mothercraft, which has limited mobility once reaching / anchoring at the ocean-ice interface. SWIM enables active sampling of ocean water beyond the reach of the SESAME robot (increasing the chances of detecting biomarkers), as well as temporally- and spatially-distributed measurement of desired ocean properties, habitability metrics, and potential biomarkers (infeasible with a single robot). Together these capabilities will enable scientists to better characterize / understand the alien ocean’s composition and habitability.
In Phase I, we used a trade study and design workshop to identify and refine a viable 100 cm^3-scale SWIM robot prototype design, whose capabilities meet science / environmental requirements defined in our Science Traceability Matrix.
In Phase II, we will further mature the technical feasibility of SWIM for scientific missions at the ice-ocean interface of Ocean Worlds like Europa, by accomplishing the following 5 Major Tasks:
- Iterative System Design / Prototyping / Testing to enable three rounds of robot prototype testing (in a test tank with all subsystems integrated), and demonstrate per-robot localization / control, swarm control, and signal gradient sensing.
- Simulations to identify swarm concepts of operations / exploration strategies with high reliability / minimal hardware requirements
- Sensor Payload Development to design / fabricate / test two iterations of an ocean composition sensor suite, built with COTS sensors, then MEMS fabricated
- Communication Development to design / fabricate ultrasound transducer nodes and implement / test a 2-way communication protocol in water
- Mobility / Controls Development to demonstrate / characterize in-water mobility, state estimation, and closed-loop control



