


















William Whittaker
Astrobotic Technology, Inc. (Partnership with Carnegie Mellon University)
NIAC 2012 Phase II Whittaker Cavehopping Exploration Final Report
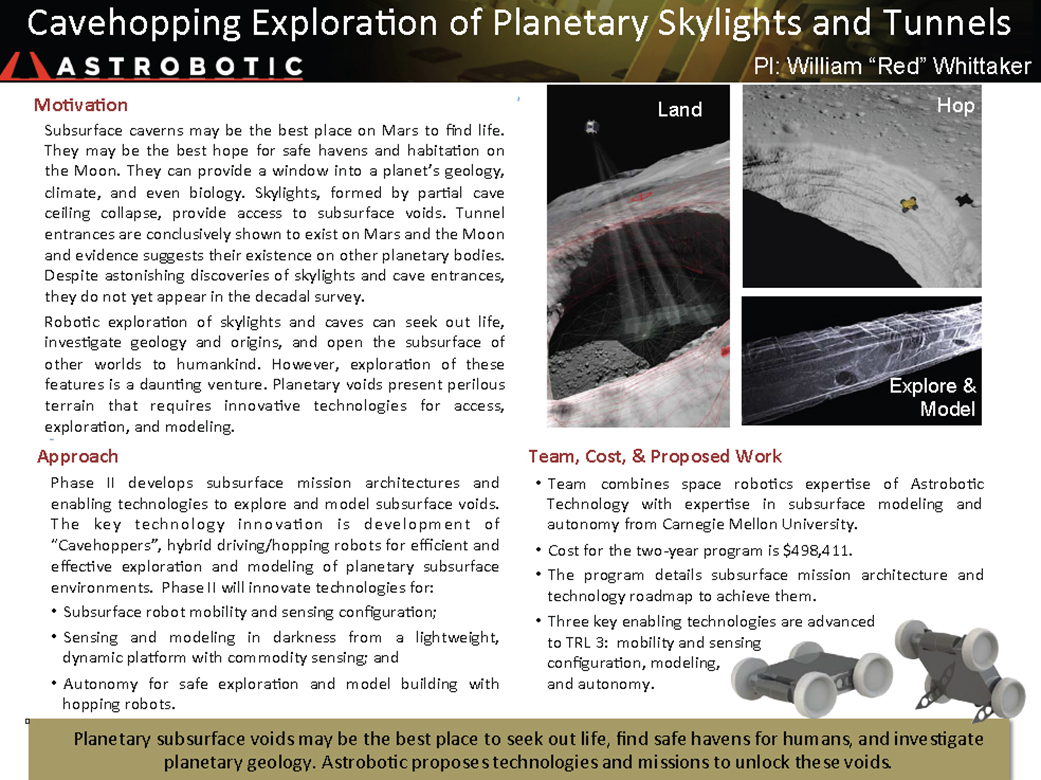
Subsurface caverns may be the best place on Mars to find life. They may be the best hope for safe havens and habitation on the Moon. They can provide a window into a planet’s geology, climate, and even biology. Skylights, formed by partial cave ceiling collapse, provide access to subsurface voids. Tunnel entrances have been conclusively shown to exist on Mars and the Moon. There is also evidence supporting their existence on other planetary bodies throughout the solar system. Despite astonishing discoveries of skylights and cave entrances, and their inevitable exploration, they do not yet appear in the decadal survey. Skylights and the voids below are so unknown that it is too risky to send astronauts to explore them without prior robotic reconnaissance and modeling. While robotic exploration of skylights and caves can seek out life, investigate geology and origins, and open the subsurface of other worlds to humankind, it is a daunting venture. Planetary voids present challenging terrain that requires innovative technologies for access, exploration, and modeling. The robots that venture into caves must leap, fly, or rappel into voids, traverse rubble, navigate safely in the dark, self-power, and explore autonomously with little or no communication to Earth. Exploiting these features necessitates a “leap” of technology from current planetary missions, which land with large error ellipses in statistically safe terrain, rove slowly and cautiously across the surface, depend on the sun for power and light, and rely heavily on human commands. Phase II develops the enabling technologies in the context of “Spelunker”, a prototype mission concept to explore a lunar skylight and cave. The Spelunker mission specifies safe landing on the rim of a skylight, tethered descent of a power and communications hub, and autonomous cave exploration by multiple hybrid driving/hopping robots. In this context, the Phase II study will expose and address major feasibility issues inherent in mission architecture for skylight access; robot configuration for in-cave mobility and subsurface sensing; terrain modeling in darkness from a lightweight, dynamic platform; and autonomy for exploring with hopping robots.
Team combines space robotics expertise of Astrobotic Technology with expertise in subsurface modeling and autonomy from Carnegie Mellon University. The program details subsurface mission architecture and develops a technology roadmap to bring missions with this architecture to flight. Three key enabling technologies are advanced to TRL 3: robot configuration for mobility and sensing, subsurface terrain modeling, and in-cave autonomy.



