
















For more than a half-century, NASA has made the stuff of science fiction into reality. Researchers are continuing that tradition by designing robots to work in a deep-space habitat, tending gardens and growing food for astronaut explorers. It sounds like a concept from Star Wars, but a team of graduate students from the University of Colorado Boulder is now developing the innovative technology to make it possible.
As astronauts explore beyond Earth, they will need to make their habitat as self-sustaining as possible. This includes growing fruits and vegetables.

“We’re hoping to take advantage of what these and other students are developing and use it in future space missions,” said Tracy Gill, NASA’s technology strategy manager at the Kennedy Space Center in Florida. “This program is an opportunity to engage university teams in helping us develop new concepts.”
The University of Colorado team’s entry in the eXploration HABitat (X-Hab) Academic Innovation Challenge is called “Plants Anywhere: Plants Growing in Free Habitat Spaces.” Instead of an area set aside just for vegetation, the approach calls for plants to be distributed in any available space in a deep-space habitat.
The X-Hab challenge is a university-level project designed to engage and retain students in science, technology, engineering and math, or STEM. The competition is intended to link student design projects with senior- and graduate-level curricula that emphasize hands-on design, research, development, and manufacture of functional prototype subsystems that could be used in extraterrestrial habitats and during deep-space exploration missions.
The University of Colorado students demonstrated their X-Hab project at Kennedy’s Space Station Processing Facility on June 23 to a group of employees that included center director Bob Cabana. They are developing a Distributed Remotely Operated Plant Production System, or DROPPS. It is a concept for producing edible plants during long-term missions to destinations such as Mars.
Heather Hava, who is working on a doctorate in aerospace engineering sciences, explains that the goal is to have robots do much of the monotonous tasks, saving time for the astronauts.
“The ‘Plants Anywhere’ approach is designed to help minimize astronaut workload,” said Hava, whose degree will focus in bioastronautics. “This keeps them free to concentrate on more important tasks.”
A year ago, the University of Colorado student team demonstrated a gardening system with plants robotically tended on a lazy Susan-like device.
“We took what we learned the past two years and applied it to this new system,” Hava said. “We decided to get away from the ‘hub concept.’ The DROPPS system gives us much more flexibility and takes advantage of unutilized space in the habitat.”
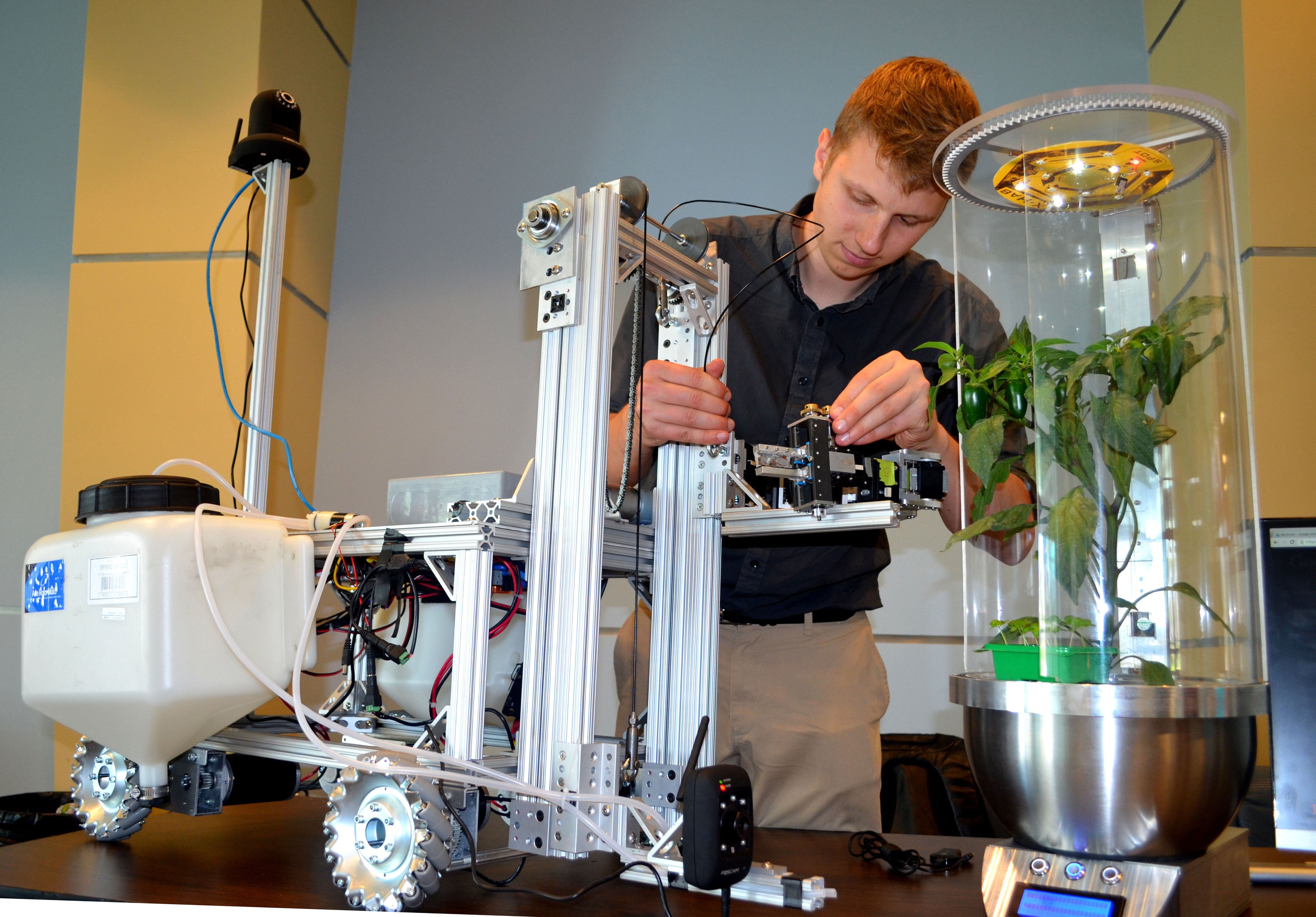
In their new system, a Remotely Operated Gardening Rover, or ROGR, travels around the habitat tending to a fleet of SmartPots, or SPOTS, which would be distributed throughout the deep-space habitat’s living space.
The SPOTS facilitate plants growing in a small, custom- designed hydroponic growth chamber with computerized systems to monitor the vegetation’s progress. Each has its own sensor run by an embedded computer.

“We envision dozens of SPOTS on a space habitat,” said Dane Larsen who is working on a master’s degree on computer science. “Telemetry in each SPOT provides data on plant condition to a computer display.”
The robots and plants are networked together, and the SPOTS have the ability to monitor their fruit’s or vegetables’ soil humidity and issue watering requests.
“The SPOTS also can measure air and water temperature, lighting provided by LEDs (light emitting diodes), as well as levels of humidity, nutrient levels and pH,” Hava said.
In chemistry, “pH” is a measure of the acidity of a solution.
As each SPOT monitors and supports its plants, it can determine when ROGR needs to perform plant maintenance tasks. ROGR is a robot on wheels, has a forklift to move SPOTS, a mechanical arm for manipulating the plants, and a fluid delivery system that can provide fresh water or water with nutrients.
Larsen explains that the system could be operated remotely or with a controller similar to those used with video games.
The ROGR robots can visit a specific plant to deliver water or to locate and grasp a fruit or vegetable. If an astronaut requests tomatoes for a salad, the system decides which specific plants have the ripest tomatoes and assigns parallel harvesting tasks to ROGR.
While living in a space habitat is basically residing in a mechanized environment, Hava says humans, by their makeup, still need to be around nature.
“We want to optimize a system allowing the humans to get psychological benefits from interacting with the plants,” she said in a 2013 Web video interview produced by the University of Colorado Boulder. “We also want the plants to be in the astronauts’ environment so they can see them, smell them and be around them. Who doesn’t love to pick a fresh strawberry?”
For Daniel Zukowski, who is also working on a master’s in computer science, the X-Hab Challenge is an opportunity to use terrestrial-based know-how and take it to a new level.
“Before joining this project, I had been working on developing robotic farming systems,” he said. “Now I have an opportunity to bridge Earth farming systems to space.”
Hava noted that the team has benefited from support from former NASA astronaut Joe Tanner, who now is a senior instructor of aerospace engineering sciences at the University of Colorado, and Nikolaus Correll, assistant professor of computer science at the university.
Gill says involving students in ongoing NASA projects is crucial for the future.
“This is an opportunity to prepare the next generation of engineers, scientists and explorers for our space program,” he said. “They tell us how their design for the system keeps evolving. That’s provided them with some real-world exposure to the systems engineering process.”
Gill added that Gioia Massa, Ph.D., of the International Space Station Ground Processing and Research Project Office, Morgan Simpson of NASA Ground Processing Directorate, and Ray Wheeler, Ph.D., of the Surface Systems office in NASA’s Engineering and Technology Directorate also provided guidance for the University of Colorado team. They all also helped advise the students as they developed their project and helped organize their demonstration.
“These students from the University of Colorado are an impressive group,” Massa said. “This is an ambitious project, and they’ve put in a lot of effort to make it work.”
NASA and the National Space Grant Foundation selected seven projects from six universities for the 2013-2014 X-Hab Academic Innovation Challenge.

Throughout the academic year, the graduate and undergraduate student teams worked to meet a series of milestones to develop systems and concepts that could be used in future deep-space habitats. In doing so, they worked in close cooperation with members of the NASA Advanced Exploration Systems (AES) Program’s Deep-Space Habitat Project team.
The challenge encourages multidisciplinary approaches, outreach efforts and partnerships with experts and industry. Participants are required to explore NASA’s work on development of deep-space habitats and help the agency gather new ideas to complement its current research and development.
The University of Colorado Boulder also is among five universities selected by NASA for the 2015 X-Hab Academic Innovation Challenge. The team’s project will focus on designing a Deployable Greenhouse for Food Production for deep-space missions. Other universities participating for the coming year are the University of Wisconsin-Milwaukee, University of South Alabama, University of Vermont and Oklahoma State University.
Hava says she would like to have an opportunity to apply her research on a deep-space mission.
“While the research is exciting,” she said, “I would love to go to Mars and explore. I see myself as potentially being the first Mars space gardener.”