



















Cold Operable Lunar Deployable Arm (COLDArm)
Conducting science during lunar night in orbiting platforms that experience prolonged deep cold when shadowed, requires rotational actuators that can operate reliably in extreme cold. Enter Game Changing project: COLDArm.
Lead Center
Jet Propulsion Laboratory
Introduced
April 2019
Point of Contact
Jonathan Sauder
Project Manager
Ryan McCormick
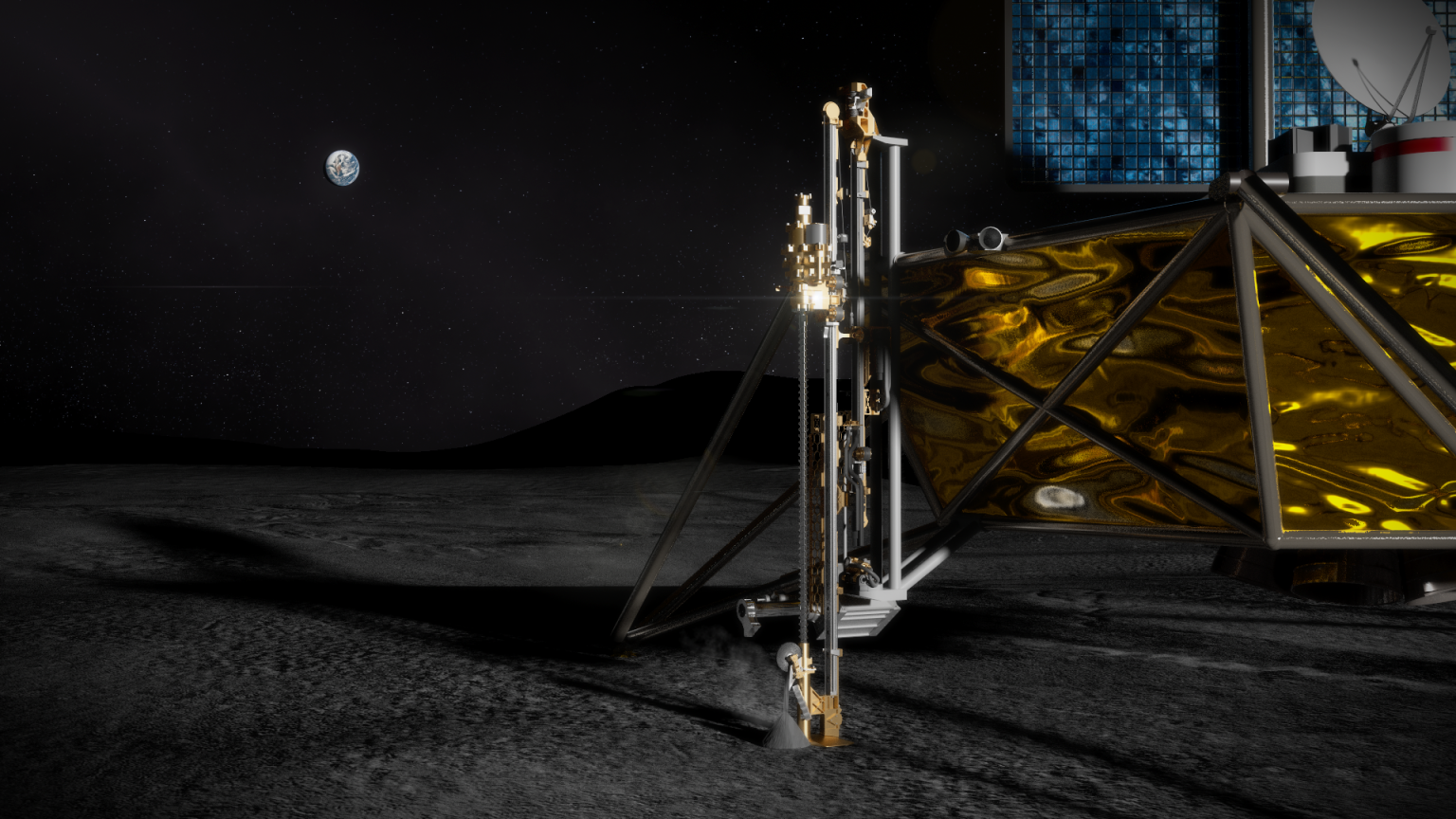
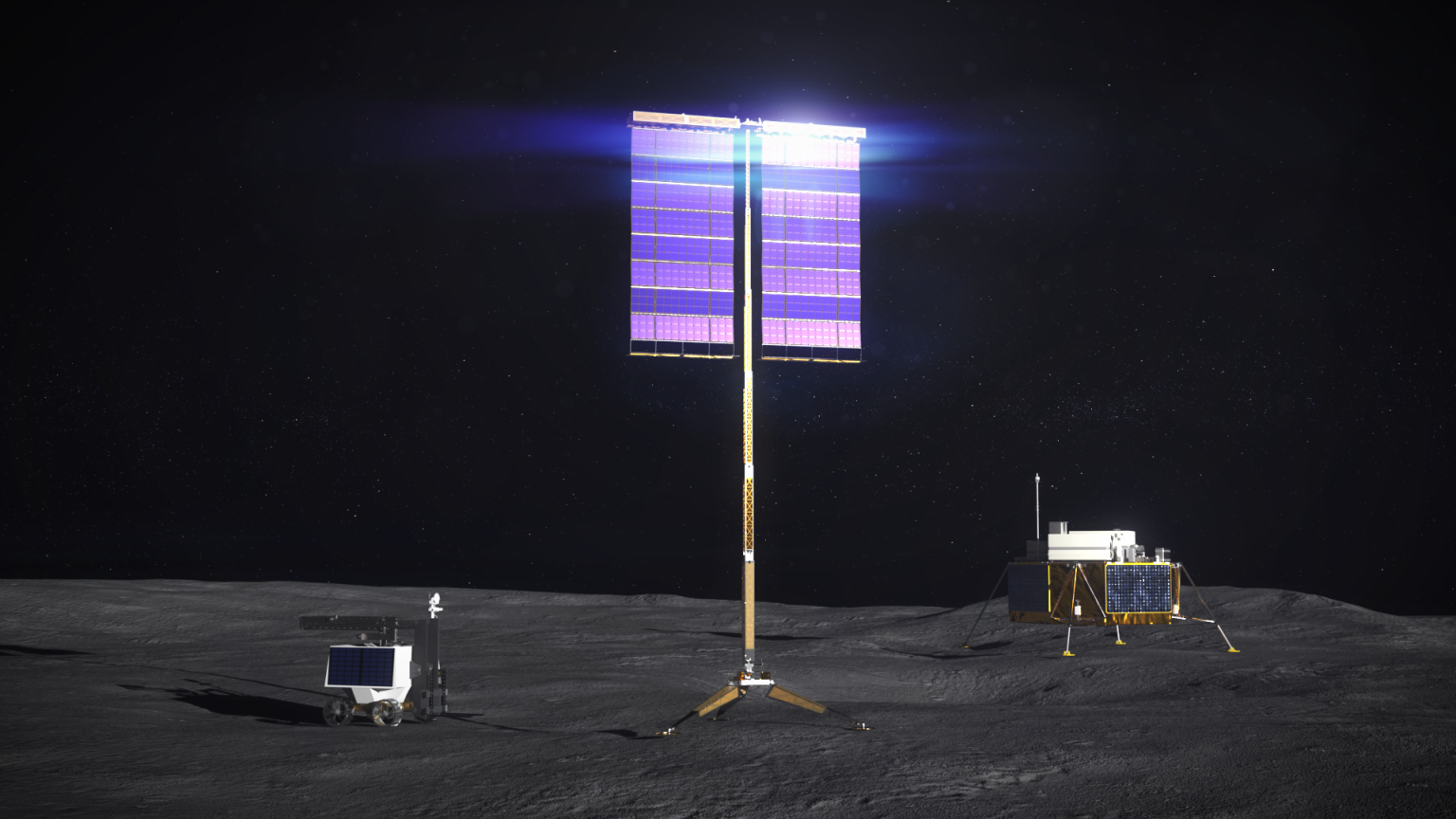
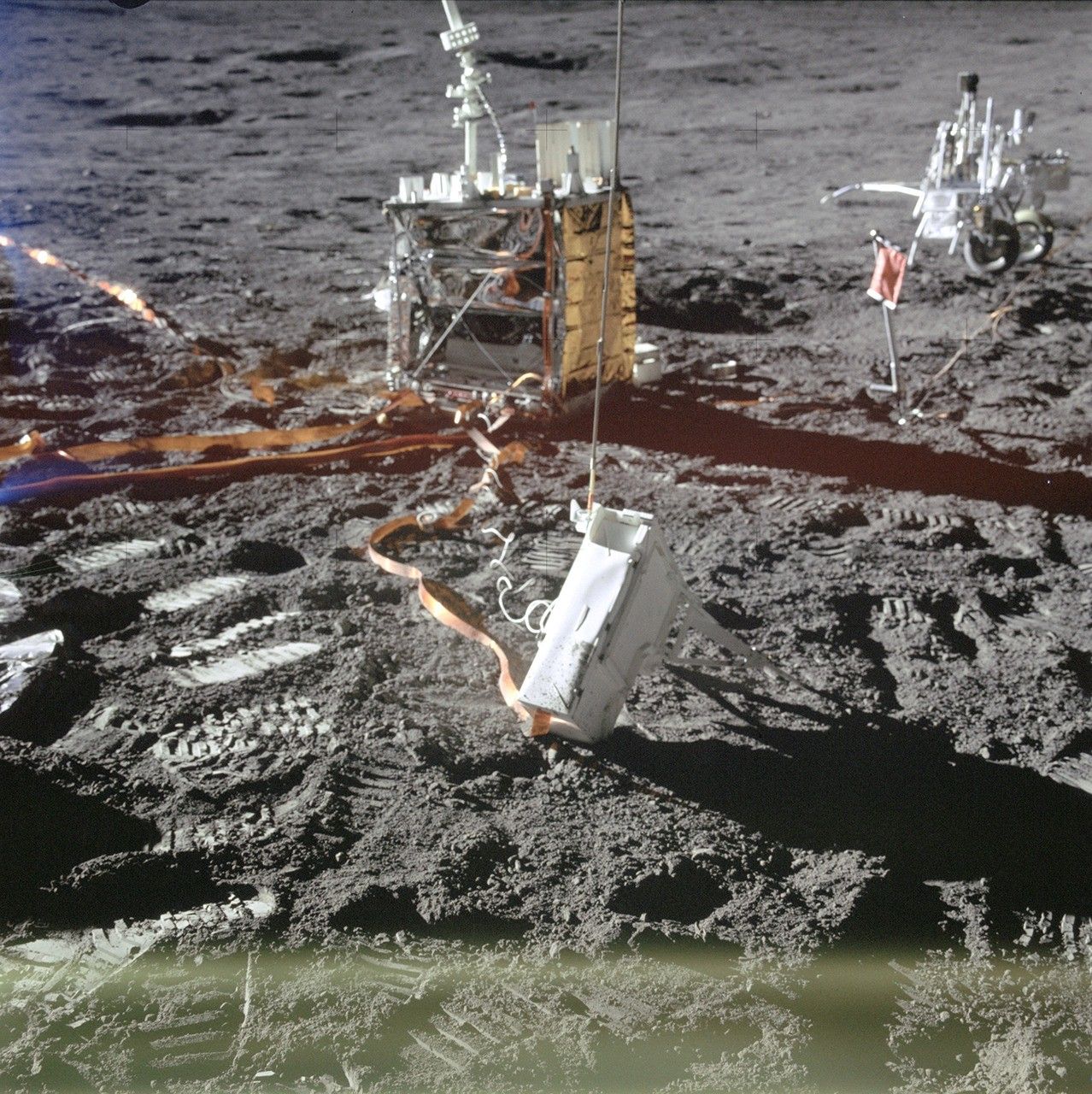
The Cold Operable Lunar Deployable Arm (COLDArm), developed by NASA’s Jet Propulsion Laboratory in Southern California, will significantly improve the utility of robotic arms for lunar landers. The arm will enable manipulation capabilities in very low temperatures, including during the lunar night, when temperatures can drop below -280 degrees Fahrenheit (-173 degrees Celsius).
The robotic arm, which is designed for a lunar lander, leverages a highly capable smartphone processing technology used for the Mars Helicopter, Ingenuity, and can perform a variety of tasks in extremely cold temperatures without the need for a heater. This includes things like scooping and analyzing lunar soil, deploying instruments, and capturing photos of the lander’s surroundings. Current robotic arm designs for lunar landers require heaters to keep the gears inside the arm from stressing and breaking when exposed to extremely cold temperatures experienced during the lunar night. COLDArm’s design features special gears and motor controllers that can operate in extreme temperatures without the need for heat, and thus, conserves power and mass for the mission.
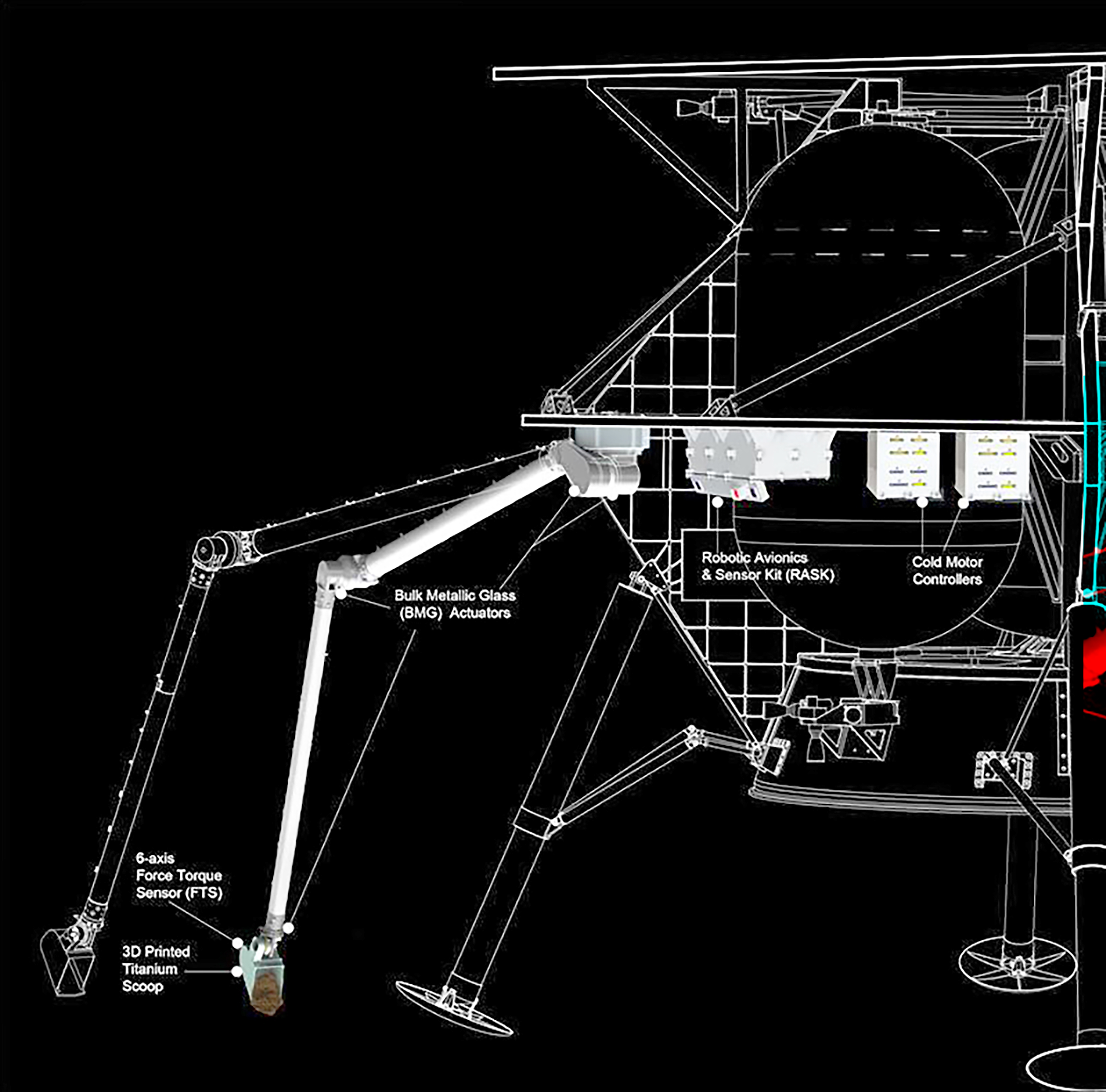
Similar to the Mars Phoenix and Mars InSight robotic arms, COLDArm features 4 degrees of freedom (movable joints), is approximately 6.5 feet (2 meters) long and can produce approximately 10 pounds of force. A sensor embedded near the arm’s “wrist” will measure and regulate the amount of force the arm exerts during any particular movement to stop the arm when the directed loads have been met and to protect the arm. The arm will be equipped with cameras for 3D mapping, lunar surface imaging, and general operations. The COLDArm team is evaluating a variety of attachments and small instruments to potentially operate at the end of the arm, including a 3D printed titanium scoop with features to collect geotechnical properties of the lunar regolith. This includes working with the awardees of the NASA@Work “Be the Game Changer” and the open-to-the-public “Honey, I Shrunk the Payloads” Challenges for potential integration of their payload instruments with COLDArm for a future demonstration.
The avionics could eventually be programmed to autonomously control the arm’s joints to perform various movements and collect pictures and sensor data. Through future software developments, COLDArm’s avionics could enable autonomous operations on ocean worlds like Jupiter’s moon, Europa.
COLDArm’s gears are being developed under the Bulk Metallic Glass Gear project. Under the NASA Small Business Innovative Research Program, Motiv Space Systems, Inc. is leading the design and fabrication of the arm and motor controllers for COLDArm. Demonstrating these technologies will enable missions to future lunar, Martian, and ocean worlds extreme environments. COLDArm is targeted to fly as a technology demonstration on a commercial robotic lander within the next five years via NASA’s Commercial Lunar Payload Services (CLPS) Initiative.
The COLDArm project is funded through the Lunar Surface Innovation Initiative (LSII) and managed by the Game Changing Development (GCD) program in NASA’s Space Technology Mission Directorate.
For more information about COLDArm, please contact Ryan McCormick: Ryan.L.Mccormick@jpl.nasa.gov.