















ALHAT
The Autonomous Landing and Hazard Avoidance Technology (ALHAT) project

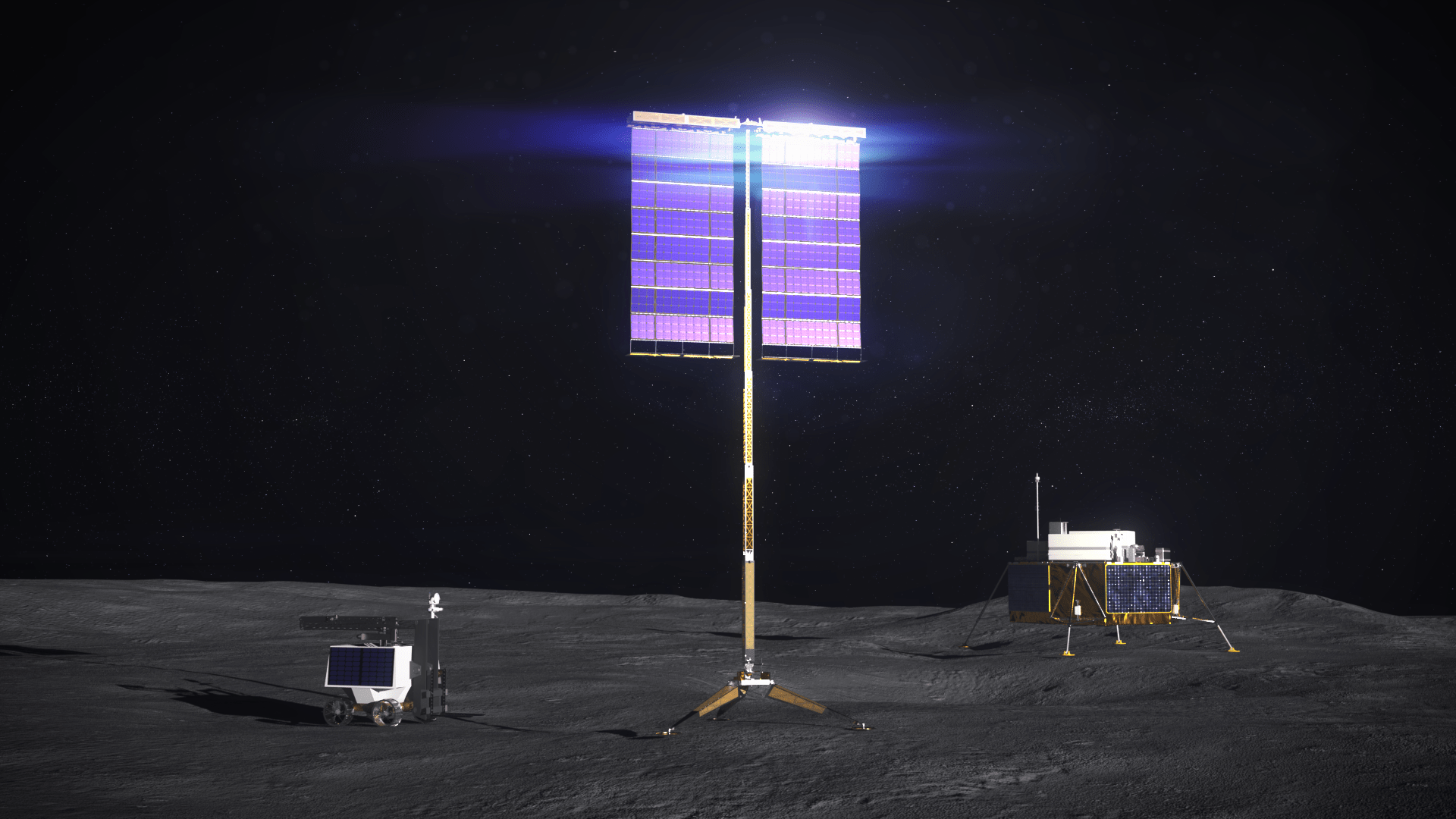
Future expeditions to destinations across the solar system will require robotic and human explorers to land near specific resources — many of them situated in potentially hazardous terrain. To that end, NASA researchers and their partners are working to equip a new generation of hardy planetary landers with the ability to automatically recognize their desired landing site, assess any and all potential landing hazards and adjust accordingly as they descend to the surface.
Once proven, these new sensors and data algorithms could dramatically improve the safety and versatility of future robotic, cargo and crewed planetary descent vehicles — opening up a host of new destinations and making it easier for human explorers to reach them.
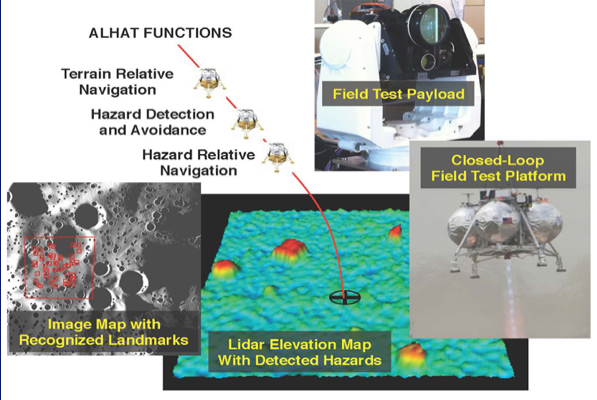
The Autonomous Landing and Hazard Avoidance Technology (ALHAT) project, one of the original TDM projects introduced in 2011 when the program was launched, sought to develop advanced technologies vital to achieving this real-time capability, including surface-tracking sensors which very precisely measure spacecraft altitude and velocity relative to the planetary surface and actively measure the topography or roughness of the landing area.
High-speed, high-volume processors would combine ALHAT algorithms with this sensor data to navigate to what’s known as the “pre-mission landing aim point,” where the technology identifies safe landing areas close to that point. The spacecraft then would be navigated to that predetermined safe area for touchdown, with the entire process controlled by automated guidance, navigation and control software on the spacecraft.
Led by NASA’s Johnson Space Center in Houston, the ALHAT team developed these technologies and integrated and ground-tested them at NASA’s Langley Research Center in Hampton, Virginia.
Project Morpheus
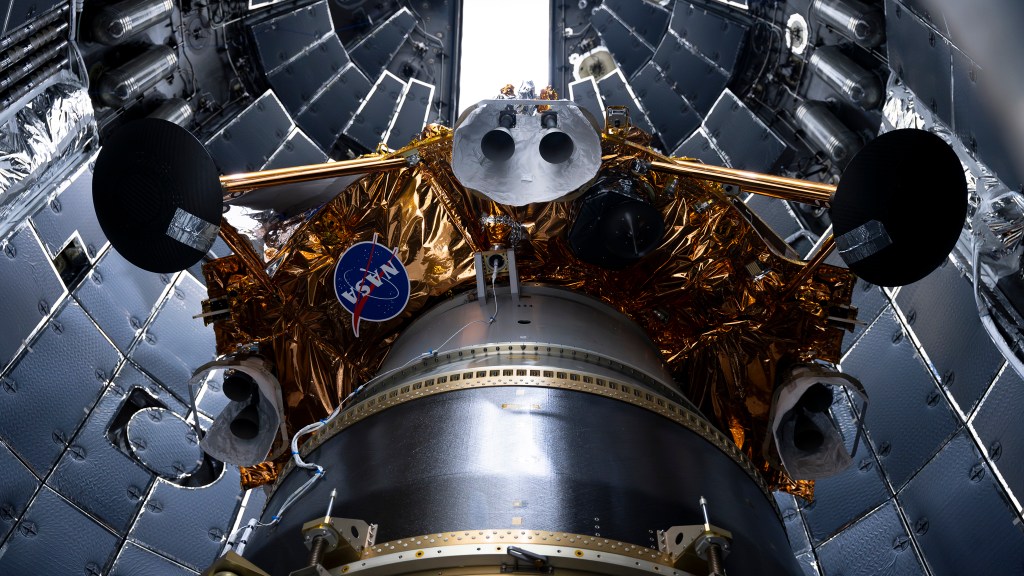
The ALHAT systems were shipped to Johnson for integration with NASA’s Morpheus Vertical Test Bed robotic lander prototype for ground testing, including short-hop flight tests.
Learn More about Project Morpheus
After successful short-hop testing, researchers shipped the Morpheus vehicle and the ALHAT system to NASA’s Kennedy Space Center, Florida, in 2012. Morpheus was destroyed during a 2012 test flight at Kennedy, the result of a test vehicle malfunction. The ALHAT project then was transferred to the Advanced Exploration Systems Division of NASA’s Human Exploration and Operations Mission Directorate, where Morpheus was rebuilt — with ALHAT successfully integrated into it — and successfully tested in 2014. The ALHAT navigation system successfully demonstrated autonomous flight, determined the safe landing areas in the field and navigated Morpheus to a controlled safe landing, bringing the ALHAT project to a successful conclusion.
NASA’s Technology Demonstration Missions are sponsored by the agency’s Space Technology Mission Directorate in Washington.
ALHAT News and Links
NASA researchers and their partners are working to equip a new generation of hardy planetary landers with the ability to automatically recognize their desired landing site, assess any and all potential landing hazards and adjust accordingly as they descend to the surface. The Autonomous Landing and Hazard Avoidance Technology project, or ALHAT, developed advanced technologies vital to achieving this real-time capability.